
[Journal Article] Model-Free Co-Optimization of Manufacturable Sensor Layouts and Deformation Proprioception
Published in IEEE Transactions on Robotics, 2026
Are massive, densely-packed sensor arrays truly better? Does designing them manually via trial-and-error have to be so painstakingly time-consuming? No! We present a novel simulator-free computational design framework that uses task gradients to optimize an initial massive number of random sensors down to a sparse, physics-ready, and highly accurate layout. By encoding strict discrete fabrication rules into differentiable loss functions, our method autonomously co-optimizes the sensor layout alongside a shape prediction network via end-to-end gradient descent.
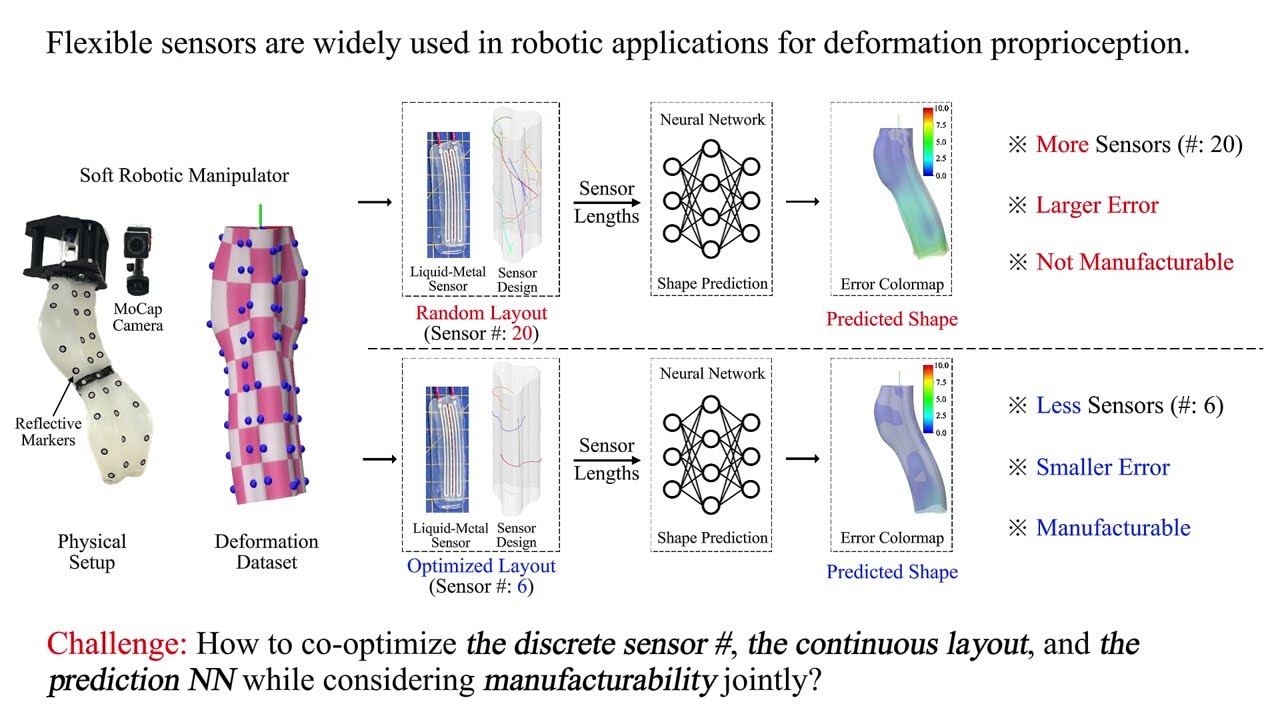
Our framework concurrently optimizes both the continuous spatial placement and discrete number of flexible sensors alongside neural network parameters for 3D shape prediction. A core novelty of our approach is reformulating inherently discrete fabrication requirements into differentiable loss functions (Overlap-free, Inter-sensor distance, and Length preference).
| Paper PDF | Code on GitHub | Video@YouTube |